Yusuke Tanaka¶

- Ph.D. in Robotics
- RoMeLa: Robotics and Mechanisms Laboratory
- The University of California Los Angeles (UCLA).
- Advised by Dr. Dennis Hong, director of RoMeLa
Projects¶
-
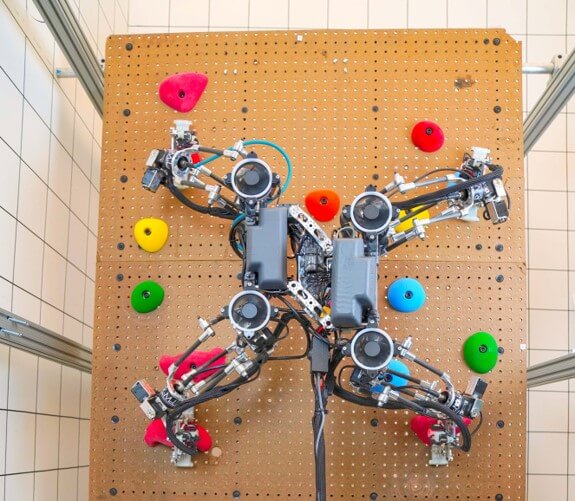
SCALER (2021-)
- Quadrupedal free-climbing robot
- Simultaneous locomotion and grasping research platform
- Parallel mechanism torso and limb
-
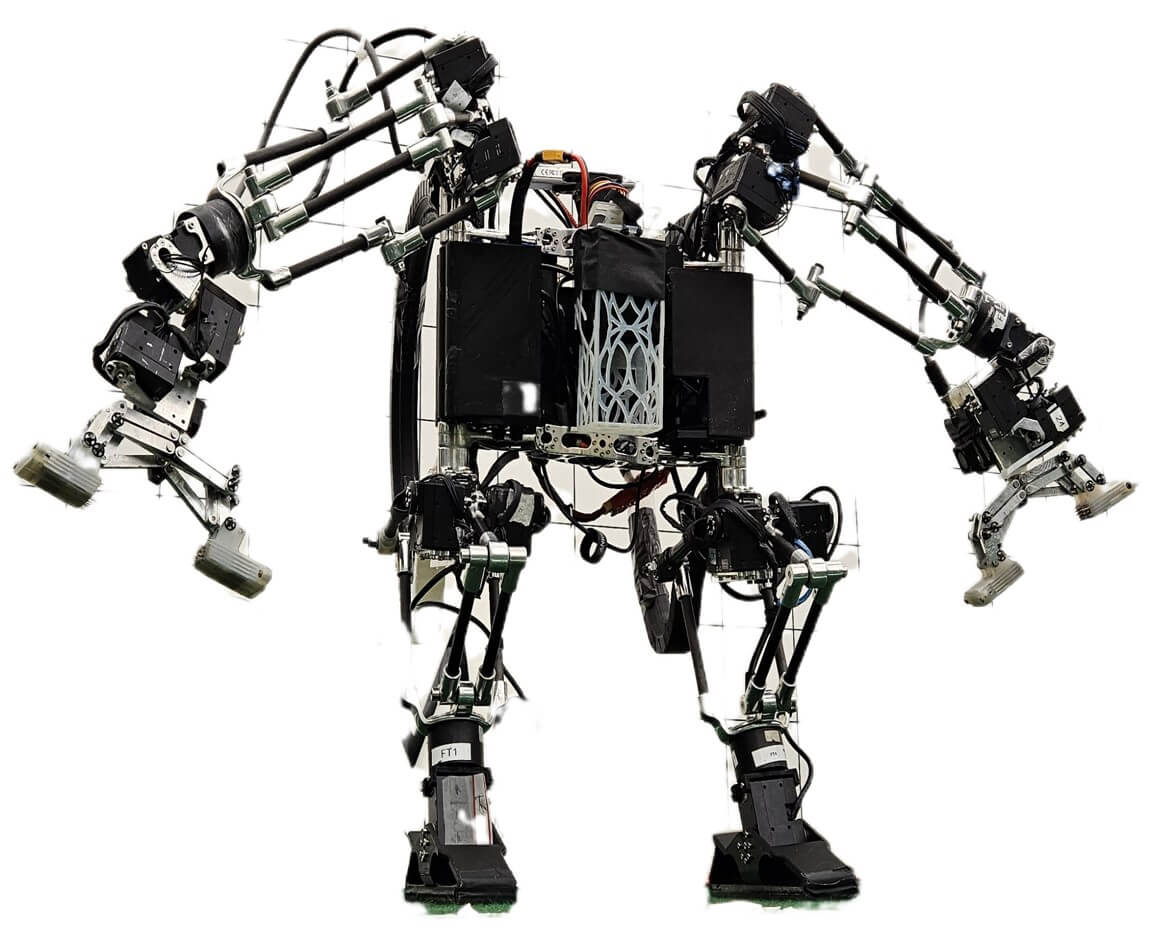
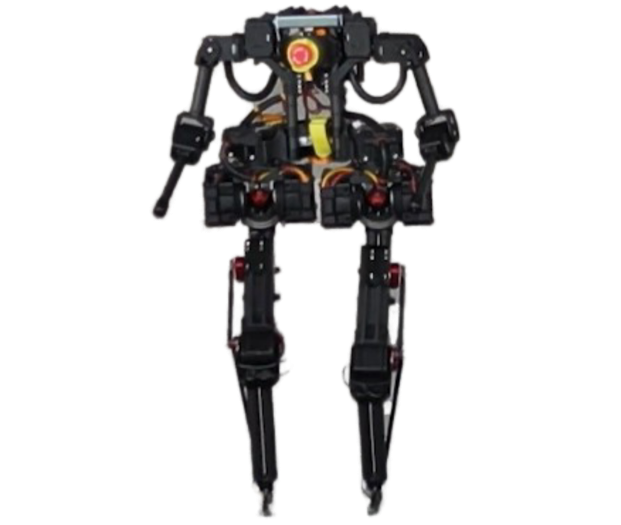
MOBIUS (2023-)
- Kids size (10kg) humanoid robot
- Climbing and pullup capable with GOAT grippers
- Multi-modal capability (Biped, quadrupedal, rolling, climbing, etc.)
-
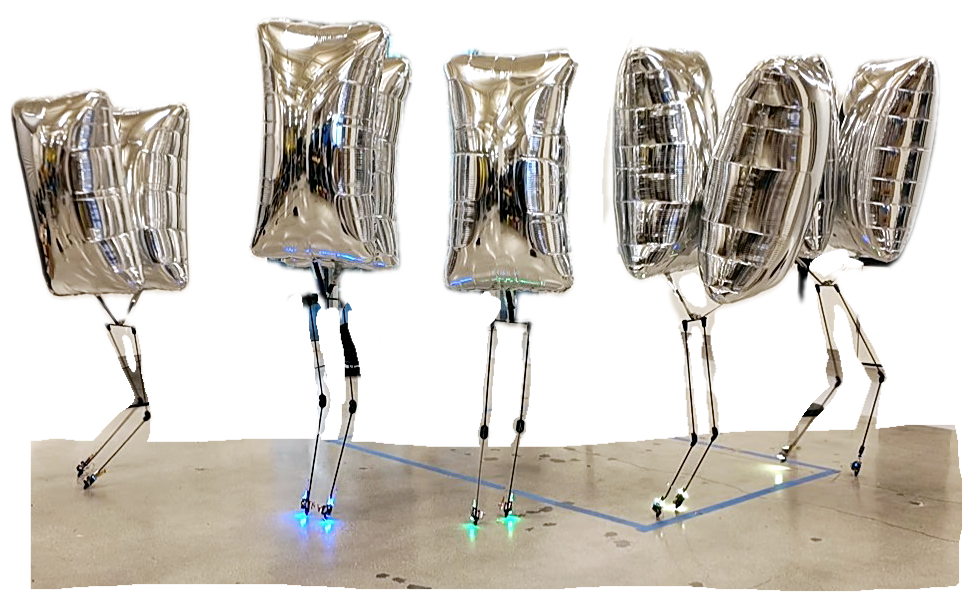
BALLU (2024-2025)
- Balloon based buoyancy-assisted bipedal robot
- Developing 3rd gen hardware, custom electronics, and control framework
- "Leg as a robot" decentralized and modular system design
-

Project AURA (2025-)
- Agentic LLM based curriculum RL training
- AURA trained humanoid robots and manipulators
-
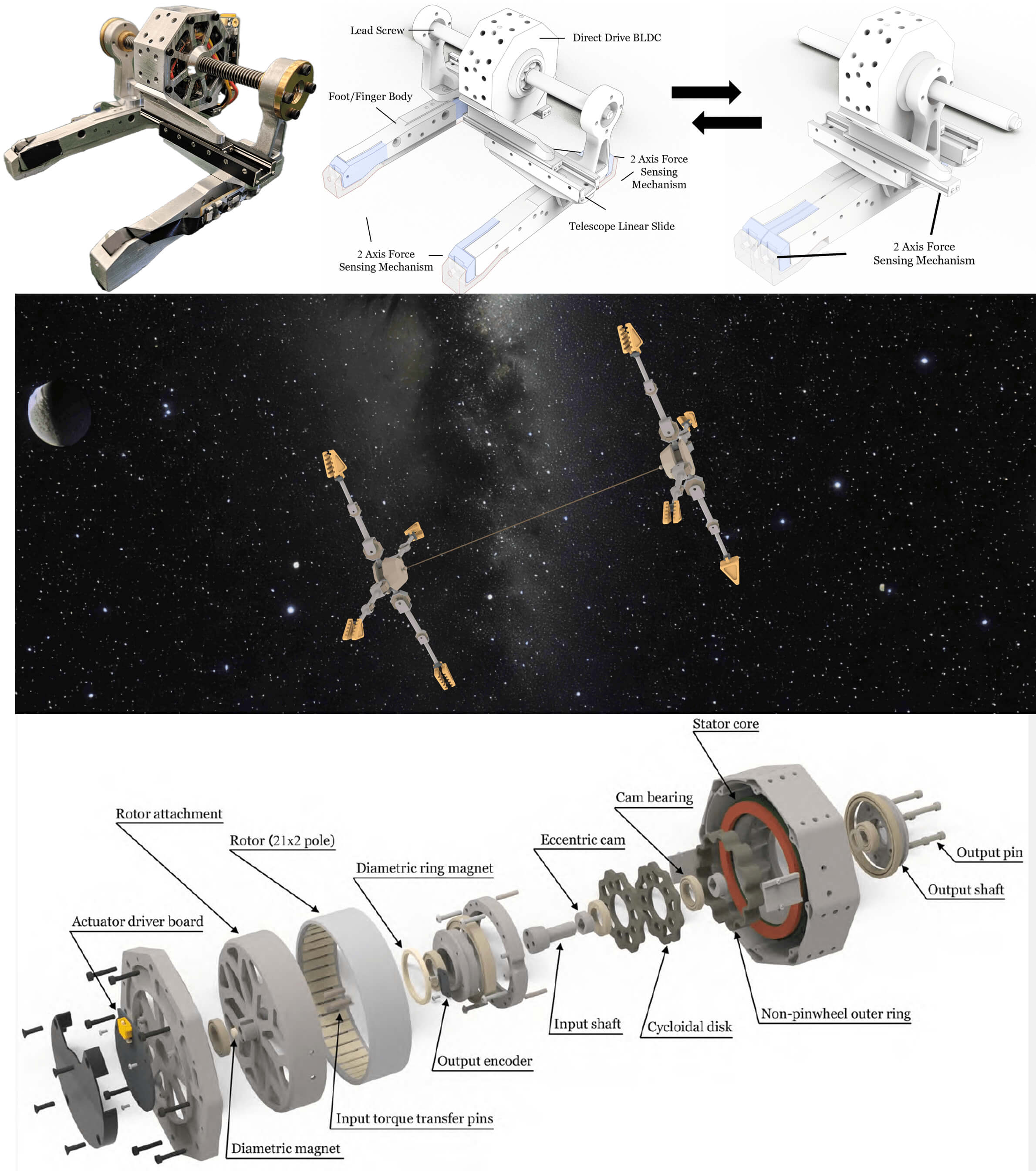
Project SPLITTER (2023-)
- Foundational work for a multi-modal agile and modular robot
- A new cycloidal gear quasi direct drive (CQDD) actuator
- A new multi-modal gripper with 3D hall effect sensor based multi-axis force sensing
- Inertial morphing MPC for attitude control in planetary exploration
-
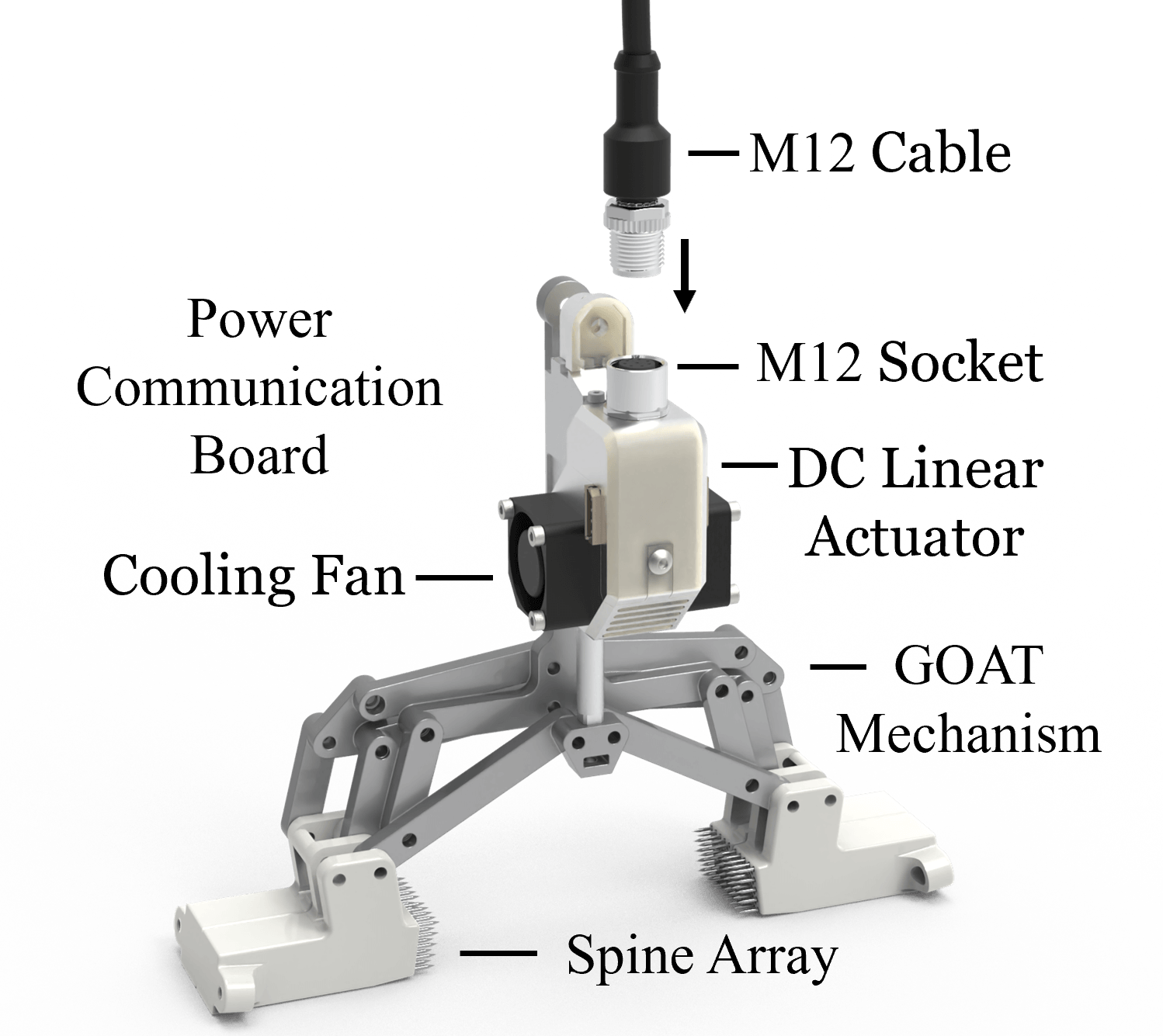
GOAT Gripper (2020-)
- New GOAT mechanism based underactuated grippers
- Passive 1 DoF and 1 active DoF
- Spine fingers for rough surfaces
- C-shaped finger for multi-modal grasping
-
BRUCE (2024-)
- Develop BRUCE simulation to consider all parallel mechanisms in BRUCE
- RL training framework using MuJoCo MJX (GPU accelerated MuJoCo)
-
SiLVIA (2019-2020)
- Developing spine enhanced passive grippers for SiLVIA, a hexapod two wall climber
-
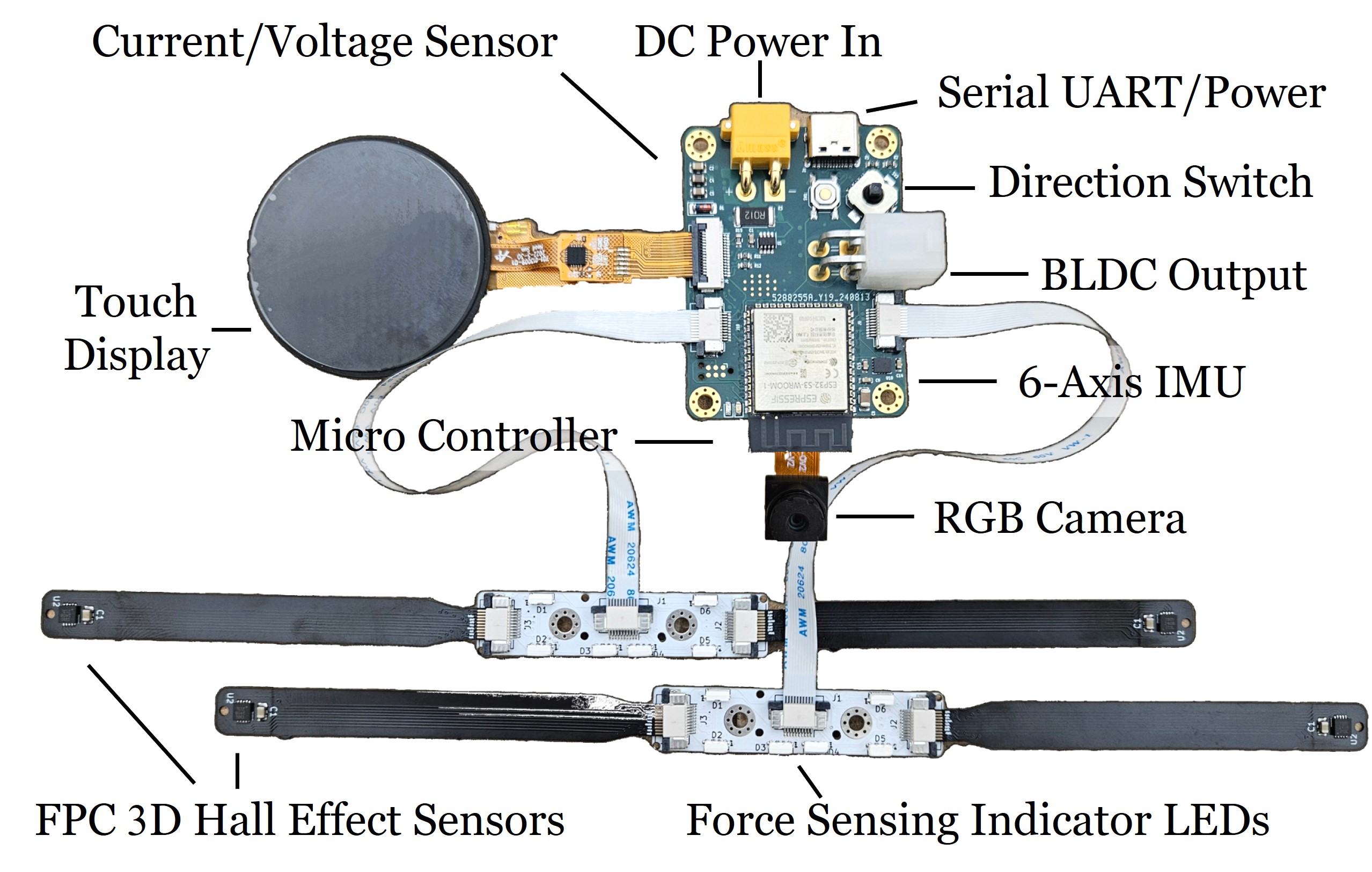
PCB Board Gallery
- Custom PCB boards
- Designed with PolymorphicBlocks in Python
-
(2025-)
- Upcoming robots with parallel linkage mechanism legs
Contribution¶




Research Area¶
- Legged, Limbed, Climbing Robots
- Mechanisms and designs
- Computational design frameworks
- Simultaneous locomotion and grasping
- Deep RL locomotion and frameworks