Project SPLITTER¶
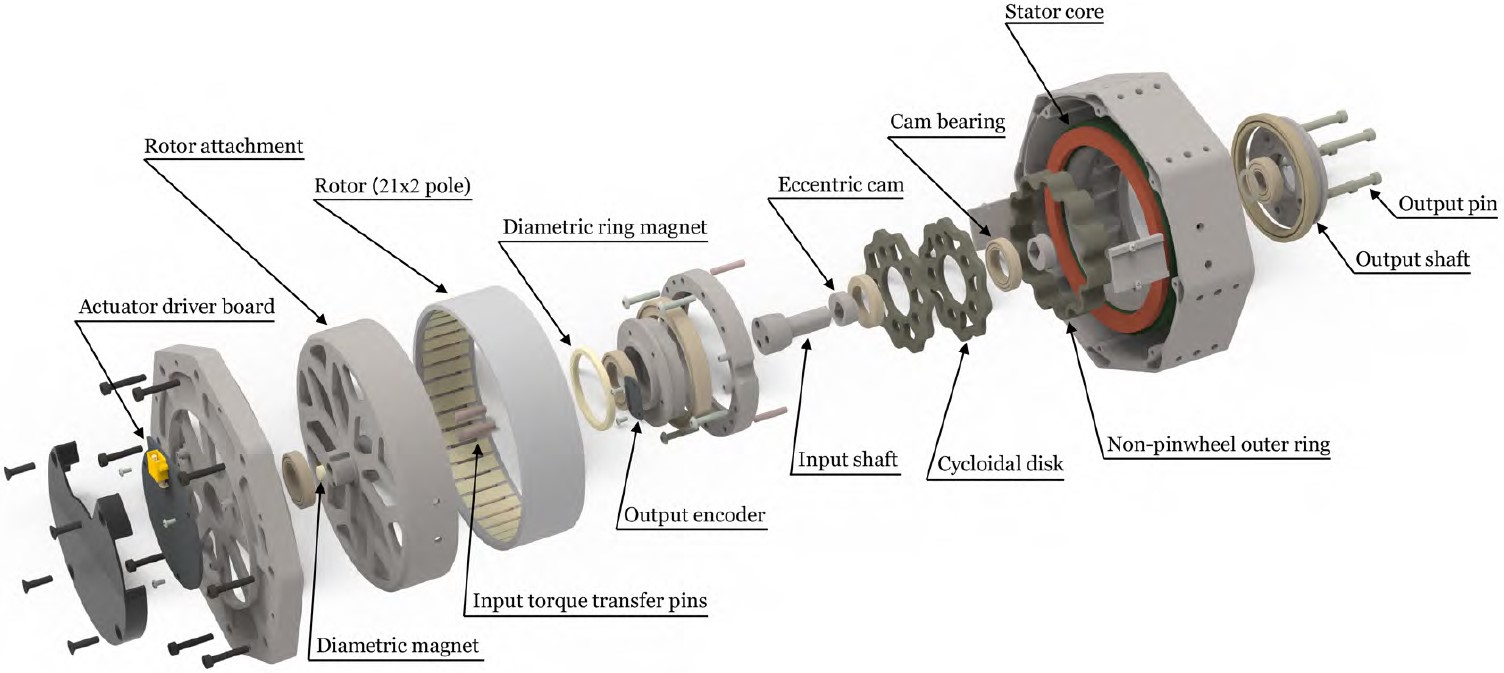
Cycloidal Gear Quasi Direct Drive (CQDD) Actuator¶
-
CQDD Exploded View
-

CQDD in Motion
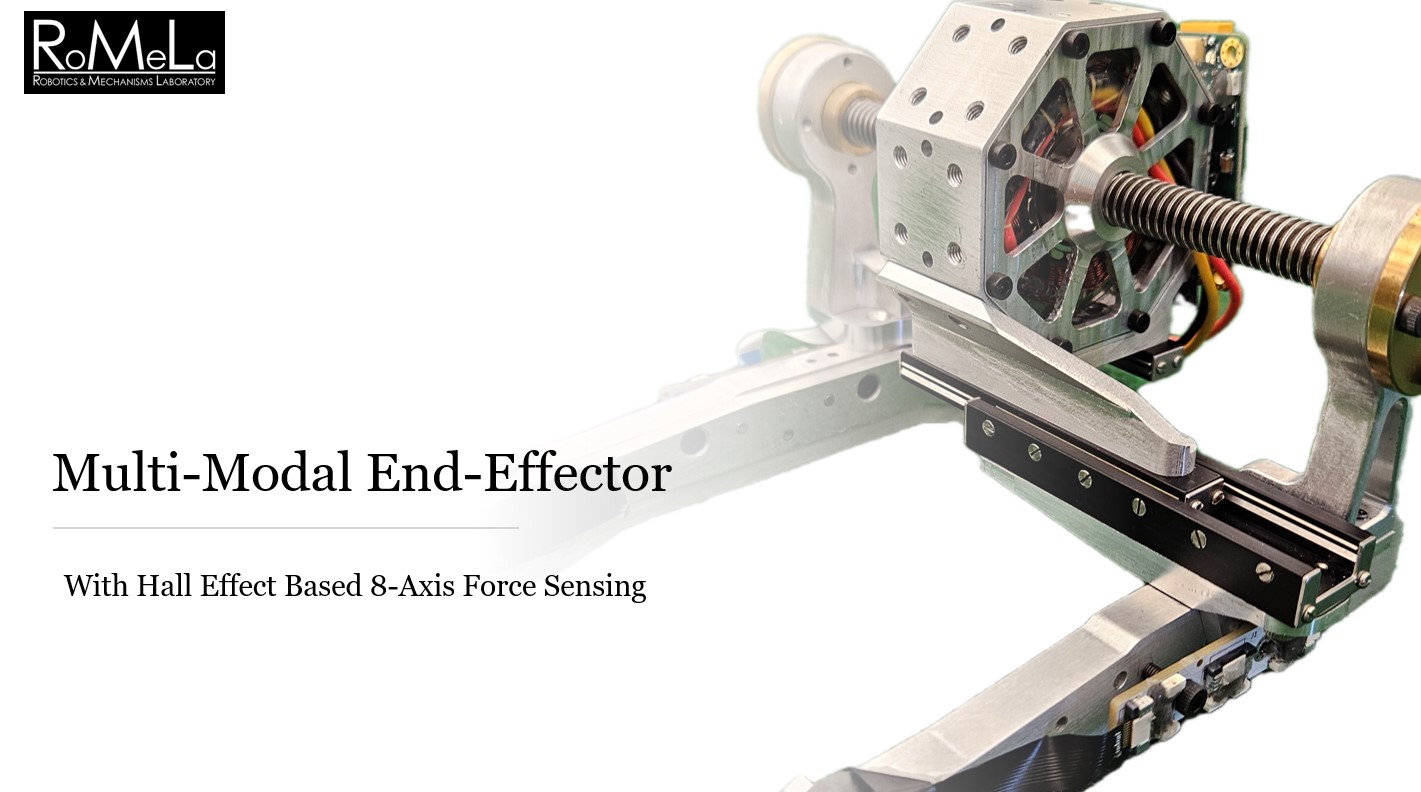
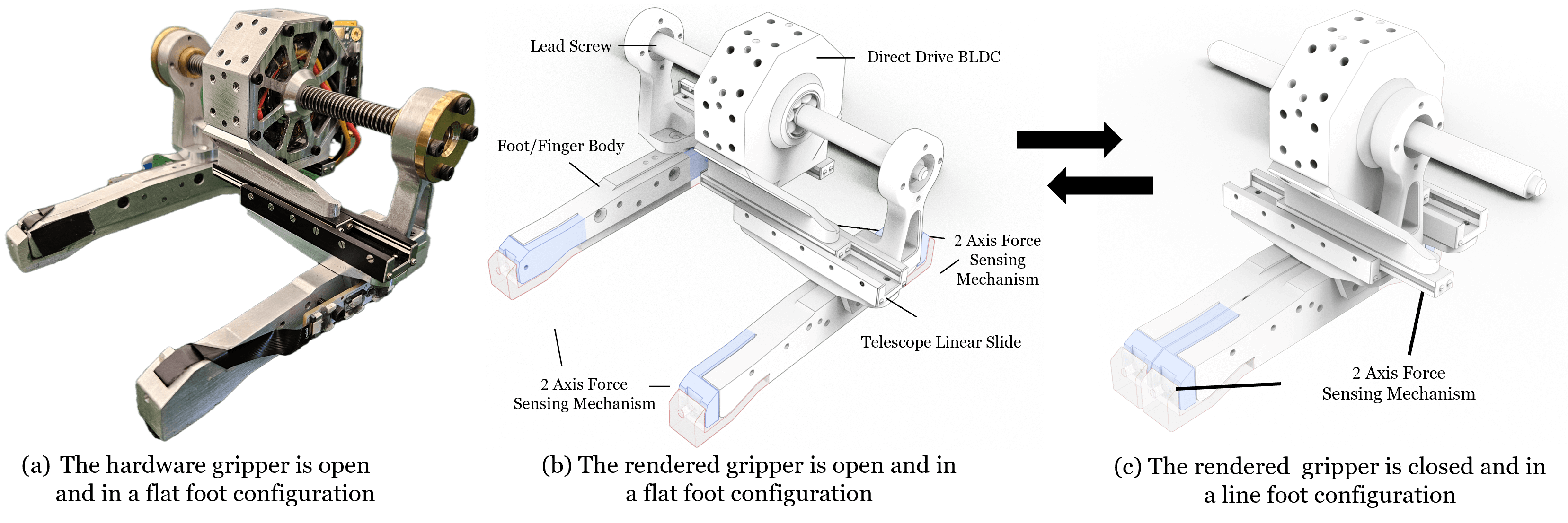
Multi-Modal End Effector with 8-axis Force Sensing¶
-
In MOBIUS, the hands work as feet when doing quadruped locomotion
- Flat feet are ideal for static cases
- Linear feet are ideal for dynamic locomotion
- Hands need to grasp objects
Need for multi-modal foot-gripper¶
 MAGPIE
MAGPIE
-

MOBIUS example
-
MAGPIE Grasping
-
Magnetic Interference Detection
-

3D Hall Effect Sensor Based Force Sensing Mechanism
-

Total 8-axis contact and grasping force sensors
-
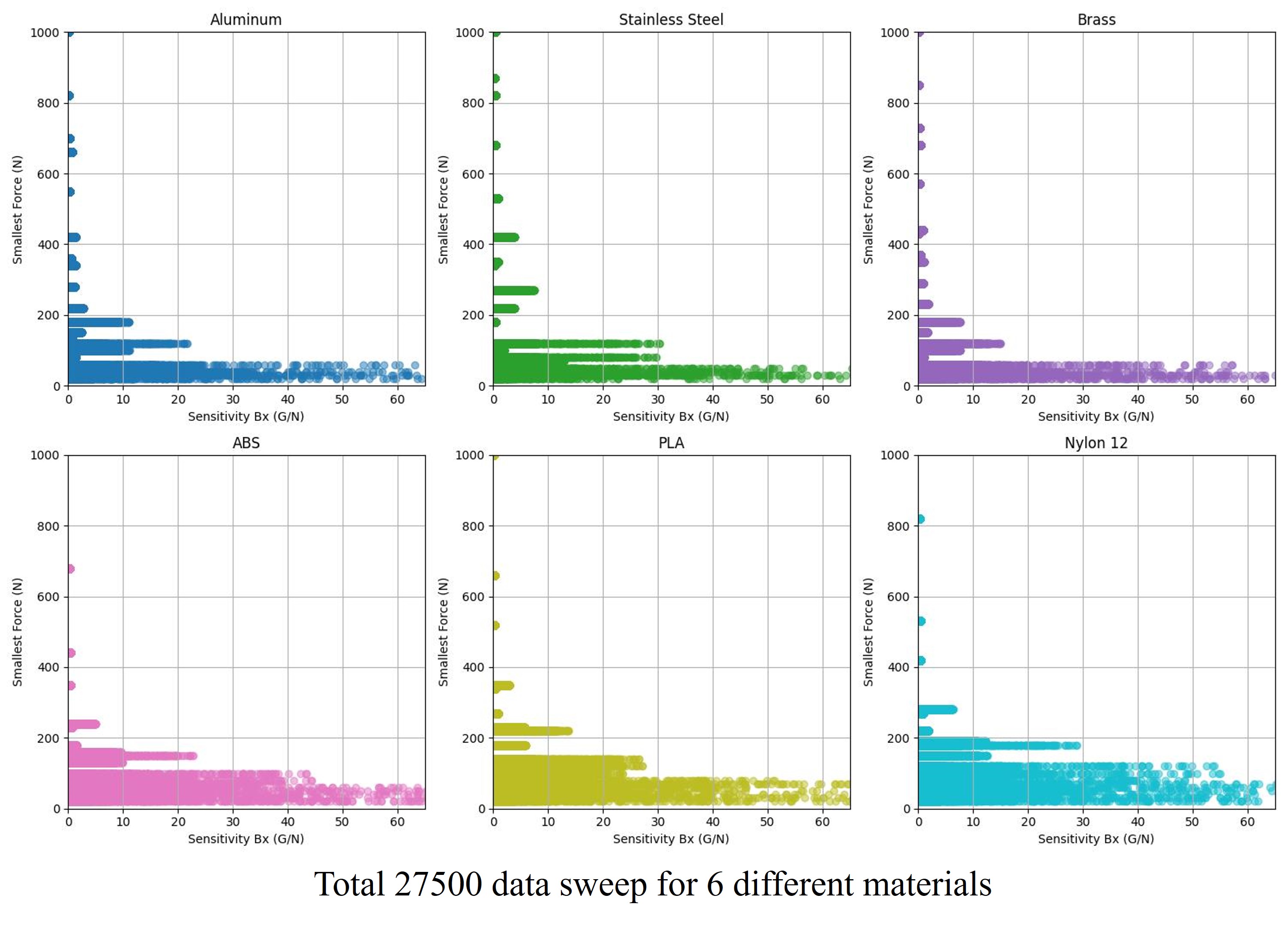
Possible sensitivity and force ranges with different materials
-

Sensor Mechanism Design
- Our computational design framework lets us design the force range and sensitivity of the 3D Hall effect-based force sensing.
- By changing the magnet sizing, positioning, and beam parameters, we can design the desired force sensing characteristics.
- Our framework generates an ideal model.
-
- Computational Framework Codes and APIs Doc
- Consider magnetic interferences
- Our stacked Gated Recurrent Unit (GRU) based mean variance estimator
- Ideal model with Gaussian radial basis functions (GRBF)

Inertial Morphing MPC and SPLITTER for space exploration¶
